|
NKC Forum |
   |
| Autor | Thema: I2C Schnittstelle für NKC 68000 | ||
|---|---|---|---|
|
redo Stammgast  ID # 245 |
 Erstellt am 05. März 2026 13:13 (#1)
Erstellt am 05. März 2026 13:13 (#1)

 Zitat Zitat
 PN PN  E-Mail E-Mail  HP HP
Hallo,
nach dem interessanten Treffen in Jitsi gestern am 4.3.26 stellte ich die Frage, wie ich in meinem Schachroboter-Projekt eine I2C Anbindung realisieren könnte. Es gab einige Vorschläge und wohl auch Interesse daran, andere I2C-Module (Temperatur, Druck...) über so eine Schnittstelle anzusprechen. In meinem Projekt will ich über ein einfaches Schachprogramm https://www.tckerrigan.com/Chess/TSCP/ einen Roboterarm ansteuern, der mir dann als Gegner entgegentritt. 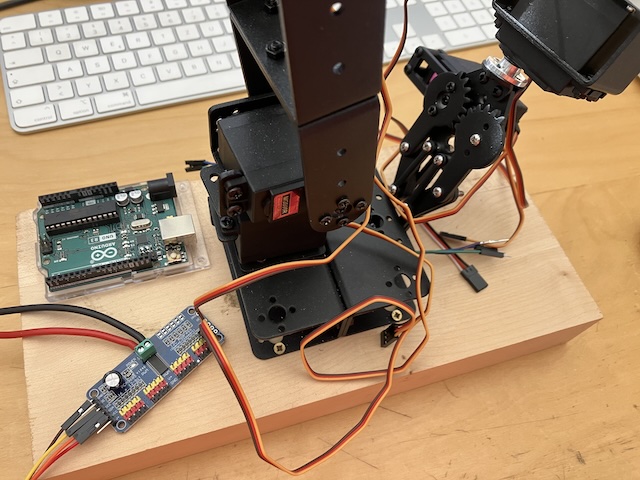 Meine ersten Gedanken gingen dorthin, über die IOE-Enh parallel Daten an einen Arduino zu übertragen, der dann (wegen seiner vorhandenen I2C-Bibliotheken) ein 16-Kanal Servoboard https://www.az-delivery.de/products/pca9685-servotreiber ansteuert und die Servos am Roboterarm bedient. 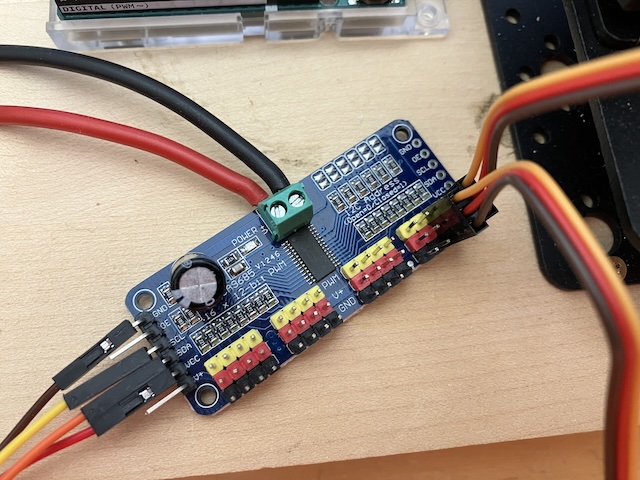 Gestern in Jitsi wurden einige Vorschläge unterbreitet, wie so etwas auch ohne Arduino lösbar wäre. Ein Muster dafür wäre wohl der NKC Tuner 2, der von Sascha Neuschl ab 2013 für den NKC entwickelt wurde. https://nkcforum.de/ndr/hardware/neu/sonst/nkc-tuner2/index.html Hans-Werner und Andi hier aus dem Forum hatten dann über Möglichkeiten berichtet und ich sollte mich da mal mit der Schnittstelle I2C und dem Protokoll vertraut machen (für meinen derzeitigen Wissensstand kein leichtes Unterfangen). Ich habe z.B. diese Quellen für die Schnittstelle gefunden: https://github.com/arduino/ArduinoCore-avr/blob/master/libraries/Wire/src/utility/twi.c https://github.com/zoubworldArduino/ZPCA9685/blob/master/ZPCA9685.cpp Sind das brauchbare Sourcecodes zum anpassen? Noch kurz zur Ausgangslage: Ich arbeite aktuell und sehr gerne mit dem NKC TangNano 20k 68000, programmiere auf Linux in ANSI-C mit dem Crosscompiler und übertrage die Programme über die USB-Schnittstelle (dl.py, rs232d) auf den NKC. Als externe Schnitstelle habe ich eine IOE Enh (derzeit mit Centronics) im kleinen BUS2 stecken. Ich habe also diesen Thread hier eröffnet, wie in Jitsi bereits angekündigt, um eine Lösung mit eurer Hilfe zu erarbeiten: I2C am NKC VG Jürgen PS: Es kann sein, dass ich mit meinen Kenntnissen noch nicht so weit bin, um das hier zu stemmen - würde aber gerne loslegen - Zeit spielt eine untergeordnete Rolle. ----------------------- Nach vielen Jahren ging es mit dem NKC wieder los.... Sehr spannend! |
||
Beiträge: 241 | Mitglied seit: Juni 2025 | IP-Adresse: nicht gespeichert | |||
|
pitdahl Stammgast ID # 250 |
Erstellt am 05. März 2026 20:49 (#2)
Zitat
PN E-Mail
Hi Jürgen, schön das Du das Thema aufgemacht hast. Ist sehr interessant, bin auf Resonanz gespannt. P.S. Ändere bitte der Richtigkeit halber oben in Deinem Post auf 4.3.26. Werde den Post verfolgen. Lieben Gruß Pit ----------------------- -was es nicht gibt wird gebastelt- |
||
Beiträge: 174 | Mitglied seit: Oktober 2025 | IP-Adresse: nicht gespeichert | |||
|
andi Voll in Gange ID # 213 |
Erstellt am 05. März 2026 21:12 (#3)
Zitat
PN E-Mail
Hallo Jürgen,
Die Links die du da eingestellt hast beziehen sich hauptsächlich auf den in den AVRs eingebauten HW-I2C. Das bringt für eine NKC-SW Lösung eigentlich nichts. Ich hab meine I2C SW-Routinen (bitbanging) die ich vor langer Zeit mal für einen 68332 geschrieben habe hier reingestellt. https://github.com/avg67/nkc/tree/main/SW/I2C_SW_routines Damit sollte das Grundprinzip klar sein. Ich hab damals zwei bidirektionale I/O-Ports des '332 für SCL und SDA genommen. Da I2C als open-Collector definiert ist (d.h. die Busteilnehmer dürfen nur aktiv eine 0 treiben, bei einer 1 geht der port auf high-Z und der Pull-up zieht das signal auf 1) schalte ich auch immer das Data-direction bit zusammen mit dem output-wert (damit eine 1 passiv, eine 0 aktiv ist). Wenn du das via IOE machst musst du das irgendwie nachbauen (z.B. jeweils 74LS05 als Treiber und an einen 245-er Eingang anschließen). Meine I2C Routinen sollte dafür leicht umzubauen sein. Ich hab nun auch begonnen einen HW-I2C ins Tang-Nano einzubauen. Den werd ich am Maus PS/2 Port anschließen (umschaltbar). Wird aber einige Zeit dauern bis das fertig ist. Anbei das Datasheet des I2C Controllers den ich einbauen werde. Hab mit dem schon mehrere Projekte gemacht. i2c_specs.pdf LG, Andi |
||
Beiträge: 533 | Mitglied seit: Mai 2021 | IP-Adresse: nicht gespeichert | |||
|
redo Stammgast ID # 245 |
Erstellt am 06. März 2026 00:11 (#4)
Zitat
PN E-Mail HP
Hallo Pit, ja, das Datum?.
Hallo Andi, geht dann bei Deinem Vorschlag die Maus verloren, wenn I2C verwendet wird? Im Roboterprojekt wäre es unerheblich. Wie wird umgeschaltet und wo würde die Zweidrahtverbindung angebracht (nur Kabel anlöten?). Gibt es für die IOE da Schaltungsvorschläge? Ansonsten warte ich da gerne auf Deine Lösung? Besten Dank. VG Jürgen ----------------------- Nach vielen Jahren ging es mit dem NKC wieder los.... Sehr spannend! |
||
Beiträge: 241 | Mitglied seit: Juni 2025 | IP-Adresse: nicht gespeichert | |||
|
andi Voll in Gange ID # 213 |
Erstellt am 06. März 2026 09:13 (#5)
Zitat
PN E-Mail
Hallo,
mit der Umschaltung Maus / I2C würde ich das so machen dass sobald der I2C eingeschaltet wird (Control Register, EN bit = 1) dass dann die Maus ausgeschaltet wird und die Leitungen zur PS/2 Buchse I2C werden. Für dein Servo-Board kannst du dir entweder ein Kabel mit PS/2 Stecker basteln oder auf dem Lochraster Feld einen Stecker löten und mit den Maus-Leitungen verbinden. |
||
Beiträge: 533 | Mitglied seit: Mai 2021 | IP-Adresse: nicht gespeichert | |||
|
hschuetz Administrator Seitenadmins  ID # 3  |
Erstellt am 06. März 2026 09:59 (#6)
Zitat
PN E-Mail
Hallo Andi,
wäre das auch in der Z80 Variante einbaubar? Hier ist die Maus eher arbeitslos. Grüße Hans-Werner ----------------------- Ob 8bit oder 16 oder 32 ist doch egal, Haupsache selbstgebaut! |
||
Beiträge: 1019 | Mitglied seit: Juni 2004 | IP-Adresse: nicht gespeichert | |||
|
andi Voll in Gange ID # 213 |
Erstellt am 06. März 2026 14:04 (#7)
Zitat
PN E-Mail
Hallo Hans-Werner,
Z80 sollte hier kein Problem sein. LG Andi |
||
Beiträge: 533 | Mitglied seit: Mai 2021 | IP-Adresse: nicht gespeichert | |||
|
Icke Ist öfters hier ID # 233 |
Erstellt am 07. März 2026 01:51 (#8)
Zitat
PN E-Mail
Hallo Jürgen,
da hast Du Dir ja ein interessantes Projekt gesucht! Nur aus Interesse: wie viele PWM-Kanäle brauchst Du denn für den Arm? Grüße Detlef |
||
Beiträge: 41 | Mitglied seit: Oktober 2023 | IP-Adresse: nicht gespeichert | |||
|
redo Stammgast ID # 245 |
Erstellt am 07. März 2026 09:21 (#9)
Zitat
PN E-Mail HP
Hallo Detlev,
der Arm verfügt über 6 Servos. Für den Schachroboter benötige ich zunächst drei Servos (eines in der XY-Ebene für die Rotation, zwei für den Ausleger). Auf den Greifer wollte ich zugunsten eines schaltbaren E-Magneten verzichten. Die Figuren würde ich selbst drucken und mit Gewichten so auslegen, dass sie sich an der magnetischen Stahlkugel am Arm möglichst senkrecht selbst ausrichten und eben gerade so hängen bleiben. So würde ein viertes Servo zur vertikalen Ausrichtung des E-Magnet nach meiner Überlegung entfallen. Ich habe da allerdings noch nicht die Wiederholgenauigkeit des Aufbaus geprüft, alles noch etwas Theorie, stehe ich ja noch am Anfang. Auch den Arm müsste ich noch umbauen. Mir erscheint die Last des ganzen Auslegers auf dem ersten Servo (XY-Ebene) zu hoch und zu wackelig. Zunächst geht es um die Ansteuerung. Da gibt es ja mehrere Möglichkeiten. Zum einen die hier schon angedachte direkte Steuerung über den NKC mittels I2C direkt, wie es Andi vorgeschlagen und schon mit praktischer Anwendung beschrieben hat oder den Umweg über eine parallele Übetragung zu einem Arduino, der die ganze Logik für das Schachbrett und den Arm beinhaltet. Das lote ich gerade aus. Das hängt auch mit meinen Fähigkeiten zusammen, da ich nur über rudimentäre Erfahrung in Schaltungstechnik und Programmierung verfüge. Da ist die Tendenz zur Verwendung fertiger Strukturen natürlich verlockend. Ich frage mal zurück, wie würdest Du das angehen? VG Jürgen ----------------------- Nach vielen Jahren ging es mit dem NKC wieder los.... Sehr spannend! |
||
Beiträge: 241 | Mitglied seit: Juni 2025 | IP-Adresse: nicht gespeichert | |||
|
Icke Ist öfters hier ID # 233 |
Erstellt am 07. März 2026 17:28 (#10)
Zitat
PN E-Mail
Hallo Jürgen,
das klingt wirklich spannend! Herzlichen Dank für die Details! Tja, was würde ich machen? Der PCA9685 ist ja ersteinmal 'nur' ein LED-ansteuerschaltkreis mit PWM, damit man die LEDs prima dimmen kann. Und I2C pflegt wenig tolerant gegenüber kleinen Fehlerchen in der Ansteuerung zu sein. Schickt man z.B. einem EEPROM nur ein Adressbyte, wo es zwei davon erwartet, dann liest man anschliessend lauter Müll, der nirgendwo im EEPROM steht. Da geht schnell viel Zeit flöten bis das klappt. Man könnte alternativ etwas basteln. Ein 82C83 oder 82C84 Timerbaustein hat 3 16Bit-Kanäle. Die sind bemerkenswert flexibel. Eine Lösung wäre z.B. ein Kanal gibt den Takt vor, alle anderen Kanäle arbeiten im one-shot Modus und werden vom ersten Kanal getriggert. Für 6 Kanäle braucht man also 3 solcher Bausteine, hat aber gleich noch 2 Kanäle für Interrupts frei. Da das Timing der Schnittstelle recht geradlinig ist (nicht wirklich gemeiner als ein statisches RAM) ist so etwas auch durchaus für den interessierten Beginner interessant. Aber es ist natürlich ein Umweg, wenn auch ein interessanter mit hohem Lernpotential. Aber so von mir nicht aufgebaut, also potentiell anschissgefährdet. Und, ganz böse, es ist OFF-TOPIC, da nicht IIC... Für IIC würde ich aber auch zu einer extra Karte greifen. Beim Basteln möchte man sich auch mal herzhaft ungeschickt anstellen dürfen. Wenn dann jedesmal dem Tang-Nano ein paar Ausgänge abrauchen macht das auf Dauer wenig Spaß. Die betagten IIC-Controller sind eher preiswürdig. Und im DIL-Gehäuse schnell ersetzt. Ausserdem ist eine Maus zum Anlernen von Positionen ganz gewiss einer Tasten-Drück-Orgie an den Pfeiltasten vorzuziehen. Bei den Servos, da musst Du Dich wohl überraschen lassen. Auf Arbeit habe ich da mit winzigen Dingerchen aus chinesischer Produktion zu tun. Die sehen in ihrem Ganzmetallgehäuse prima hochwertig aus, der Preis ist gepfeffert und sie zerfallen in 2 Gruppen: Die einen sind unartig und böswillig, die anderen unwillig und bösartig. Heisst: Es finden sich fast immer Stellungen, in denen sie nie ruhig stehen bleiben sondern herumrappeln oder fiepen und ordentlich strom ziehen. Und einige driften langsam, aber merklich von ihrer eingestellten Position davon. Man muss ihnen tatsächlich nach erreichen der zugedachten Position den Strom abschalten... Aber so etwas auszuprobieren und vielleicht Workarounds zu finden, das ist ja das Salz in der Bastlersuppe, nicht wahr? Herzliche Grüße Detlef |
||
Beiträge: 41 | Mitglied seit: Oktober 2023 | IP-Adresse: nicht gespeichert | |||
|
redo Stammgast ID # 245 |
Erstellt am 08. März 2026 00:39 (#11)
Zitat
PN E-Mail HP
Hallo Detlev,
besten Dank für die Informationen. Ich werde da jetzt zunächst so vorgehen, diese I2C LED Platine am Arduino betreiben und die Servos testen. Ich baue mir dazu einen einfachen Zeiger und verfahre die Servos in verschiedene Positionen, um die Effekte, die Du angeführt hast, auszutesten. Ich denke, da wird sich der Spreu vom Weizen trennen und ich erhalte Informationen darüber, ob das Projekt mit den Servos aus dem Roboterbausatz so überhaupt umzusetzen ist. VG Jürgen ----------------------- Nach vielen Jahren ging es mit dem NKC wieder los.... Sehr spannend! |
||
Beiträge: 241 | Mitglied seit: Juni 2025 | IP-Adresse: nicht gespeichert | |||
|
Icke Ist öfters hier ID # 233 |
Erstellt am 08. März 2026 11:44 (#12)
Zitat
PN E-Mail
Hallo Jürgen,
das ist doch ein Plan! Ich habe da wohl auch nicht genau gelesen und nicht realisiert dass die Komponenten schon so vor Dir auf Deinem Tisch liegen. Damit ist I2C ja bereits 'gesetzt' und mein Geschwurbel zu Alternativen kannst Du damit getrost vergessen. Wir sind natürlich gespannt auf Deine Ergebnisse. Grüße Detlef |
||
Beiträge: 41 | Mitglied seit: Oktober 2023 | IP-Adresse: nicht gespeichert | |||
|
andi Voll in Gange ID # 213 |
Erstellt am 08. März 2026 21:02 (#13)
Zitat
PN E-Mail
Hallo,
ich hab nun ein FPGA-File mit dem I2C drin. https://github.com/avg67/nkc/blob/main/tang_nano_20k/NKC_68020_I2C_PS2_KEYB_PCB.fs Doku: https://github.com/avg67/nkc/blob/main/tang_nano_20k/doc/i2c.pdf Es folgt in den nächsten Tagen ein Testprogramm in C. Die Benutzung ist recht einfach - siehe Kapitel 6 - Programming Examples. Die Register I/O-Addressen für den NKC stehen in Kapitel 3 ($ffffff08 - $ffffff0e) Anbei ein Screenshot von meinem Logicanalyser wo ich eine Start-Bedingung und danach die Addresse 0x51 raus sende.  Data0 ist SCK, Data1 ist SDA LG, Andi |
||
Beiträge: 533 | Mitglied seit: Mai 2021 | IP-Adresse: nicht gespeichert | |||
|
andi Voll in Gange ID # 213 |
Erstellt am 12. März 2026 20:59 (#14)
Zitat
PN E-Mail
Hallo,
ich hab die I2C Library fertig und bei mir getestet. Ich hab dazu einen PCF8574 (PIO) + PCF8591 (AD/DA-Wandler) angeschlossen. https://github.com/avg67/nkc/tree/main/SW/I2C_HW_Routines Ich hab hier einen I2C Scanner geschrieben der den I2C Bus nach Devices absucht und alle gefundenen Slaves ausgibt (Adresse). Danach schreibe ich auf den PCF8574 einen Wert in das Ausgangsregister und lese ihn anschließend wieder zurück - siehe Screenshot Angeschlossen ist das ganze am Maus PS/2-Port. SCL an Mouse-Clock, SDA an Mouse-Data. LG, Andi 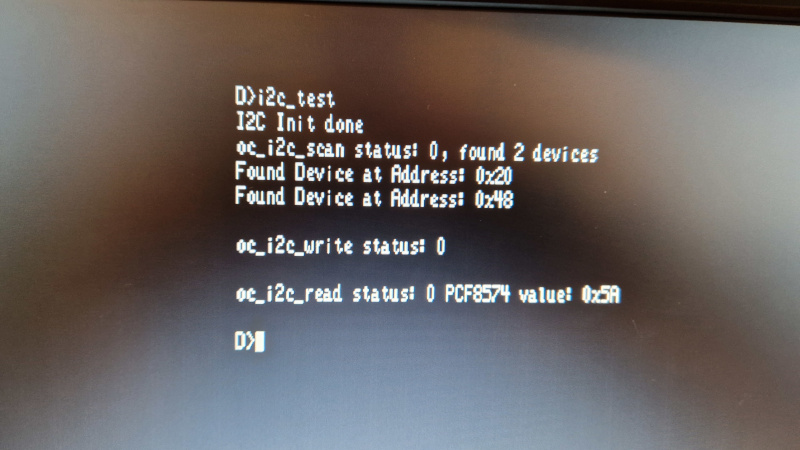 |
||
Beiträge: 533 | Mitglied seit: Mai 2021 | IP-Adresse: nicht gespeichert | |||
|
redo Stammgast ID # 245 |
Erstellt am 12. März 2026 23:34 (#15)
Zitat
PN E-Mail HP
Hallo Andi,
danke. Dann bau ich jetzt den zweiten TangNano für den 68020 auf und versuche mein Glück mit dem 16-Kanal I2C Board und ein paar Servos. Dazu verwende ich den obigen FPGA File. Die Entwicklungsumgebung ist Linux mit gcc 6.3.0 nur mit C. Ich melde mich wieder. VG Jürgen ----------------------- Nach vielen Jahren ging es mit dem NKC wieder los.... Sehr spannend! |
||
Beiträge: 241 | Mitglied seit: Juni 2025 | IP-Adresse: nicht gespeichert | |||
|
andi Voll in Gange ID # 213 |
Erstellt am 12. März 2026 23:49 (#16)
Zitat
PN E-Mail
Hallo,
Ok. Ich update am Wochenende noch die übrigen FPGA files, inklusive dem Z80 mit dem I2C Interface LG Andi |
||
Beiträge: 533 | Mitglied seit: Mai 2021 | IP-Adresse: nicht gespeichert | |||
|
redo Stammgast ID # 245 |
Erstellt am 13. März 2026 09:18 (#17)
Zitat
PN E-Mail HP
Hallo Andi,
fast hätte ich es vergessen. Hast Du für den Testaufbau noch weitere Bauteile (z.b. die angesprochenen 7405 - open-collector) verbaut, oder die beiden I2C Baugruppen direkt angesprochen? Und wie war das mit den 4,7k Widerständen, die das Signal auf +5V ziehen? Hättest Du vielleicht eine kleine Skizze dafü, wie Du das angebunden hast. Ich frage, bevor etwas kaputt geht? VG Jürgen ----------------------- Nach vielen Jahren ging es mit dem NKC wieder los.... Sehr spannend! |
||
Beiträge: 241 | Mitglied seit: Juni 2025 | IP-Adresse: nicht gespeichert | |||
|
andi Voll in Gange ID # 213 |
Erstellt am 13. März 2026 09:47 (#18)
Zitat
PN E-Mail
Hallo Jürgen,
nein, du brauchst sonst nichts mehr. Ist alles bereits im FPGA bzw. auf dem Booard drauf. Auf dem Board sind 2k Pull-up Wiederstände drauf. Die sollten eigentlich reichen. PS/2 ist dem I2C sehr ähnlich (auch open-collector) dadurch funktioniert das ohne irgendwas zusätzlich. Ich hab mir nur ein Kabel von PS/2 auf mein Steckboard gebastelt wo die I2C Chips drauf waren. Du kannst auch am Lochrasterfeld einen Stecker löten wo du dein Servo-Board ansteckst. Wichtig ist dass du die Signals an der Maus PS/2 Buchse abgreifst, denn dort haben sie 5V Pegel Ich hab dir mit dem Copiloten eine Vorlage wie die Ansteuerung des Servo-Boards aussehen könnte gemacht und angehängt. Du muss auf das Delay in pca9685_init() achten. Dieses muss >=500us sein! Ich hab dir ein "fixme" dazu geschrieben! Die aktuelle Implementierung passt da sicher nciht (die 680XX Cpu im Tang-Nano ist sehr schnell!). Konnte es aber nciht testen! Achte bitte aber auf die 5V Stromversorgung der Servos! Diese ziehen sehr viel Strom wenn sie sich bewegen. Das sollte von den +5V des Tang-Nano getrennt sein, sonst gibt's Probleme (Spannungseinbrüche etc. die das Tang-Nano resetten). Ah und wenn du ein Oszilloskop hast schau dir mal die I2C Signale (SDA, SCL) beim Servo-Board an wie die ausschauen (wegen langen Kabel etc.). Ev. musst du da noch mit zusätzlichen Pull-up Wiederständen aushelfen. 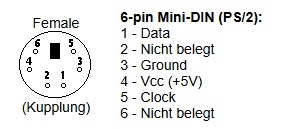 pca9685_servo.c |
||
Beiträge: 533 | Mitglied seit: Mai 2021 | IP-Adresse: nicht gespeichert | |||
|
redo Stammgast ID # 245 |
Erstellt am 17. März 2026 15:33 (#19)
Zitat
PN E-Mail HP
Hallo Andi,
ich hab den NKC jetzt fertig und den 68000er FS installiert. NKC und Jados funktionieren soweit. Die testprogramme von Dir habe ich bei mir bereitsgestellt. Übersetzen und hochladen klappt alles. In der i2c_test.c ist der 40 MHz Bus angegeben. Wie hoch ist die Busfrequenz beim 68000er? Ich habe das schonmal auf 10 MHz eingestellt, wie im Github bei den FS-Dateien beschrieben. Stimmt das? Das Testprogramm findet noch kein I2C-Gerät im Scan. Im Oszi zappelt was auf SCL und SDA.... da muss ich mich nochmal einarbeiten, schon lange nicht mehr verwendet. Korrektur: Ich habe die Pins am PS/2-Anschluss spiegelbildlich vertauscht. Jetzt werden mit 10 MHZ zwei Devices bei 0x40 und 0x70 gefunden. Schreibversuche auf 0x40 werden mit ACK Status: 0 beantwortet. Aber das mit den 10 MHZ für den 68000er ist ok? VG Jürgen ----------------------- Nach vielen Jahren ging es mit dem NKC wieder los.... Sehr spannend! |
||
Beiträge: 241 | Mitglied seit: Juni 2025 | IP-Adresse: nicht gespeichert | |||
|
andi Voll in Gange ID # 213 |
Erstellt am 17. März 2026 16:49 (#20)
Zitat
PN E-Mail
Hallo Jürgen,
nein die Busfrequenz ist IMMER, bei allen SOCs 40MHz, auch wenn die CPU nur mit 10MHz (oder wie beim Z80 nur mit 8MHz) läuft. Wenn du das auf 10MHz reduzierst stimmt der Teilerfaktor für die I2C-Busfrequenz (100kHz) nicht mehr. Er läuft dann mit 400kHz (was gerade so noch ok sein sollte für den PCA9684, könnte aber mit längeren Kabeln ev. ein problem sein) ACK Status 0 ist ein Erfolg! Ein PCA9685 liegt an der Adresse 0x40, d.h. er antwortet mit einem ACK ! |
||
Beiträge: 533 | Mitglied seit: Mai 2021 | IP-Adresse: nicht gespeichert |
| |
| https://nkcforum.de | Boardregeln | Datenschutzerklärung
Tritanium Bulletin Board 1.8
© 2010–2021 Tritanium Scripts
Seite in 0,037831 Sekunden erstellt
19 Dateien verarbeitet
gzip Komprimierung eingeschaltet
2350,75 KiB Speichernutzung